Lösung: Arduino UNO Taster 1
Aufgabe a)
Quellcode I
#define F_CPU 16000000UL
#include <avr/io.h>
int main(void)
{
DDRD |= 0b11111111;
DDRB &= ~0b00000100;
while (1)
{
if(!(PINB & 0b00000100)) {
PORTD |= 0b00000100;
}
PORTD &= ~0b00000100;
}
}main() Funktion
DDRD |= 0b11111111;
PortD als Ausgang definieren. Alle Pins sollen als Ausgang fungieren.
DDRB &= ~0b00000100;
PB2 als Eingang definieren definieren (mit Bitmaske)
Hauptschleife
-
if(!(PINB & 0b00000100)) {}Auf Tastendruck warten.
Dabei ist zu bedenken, dass der Taster low-active ist. Die Abfrage mit der Bitmaske (UND-Maske) muss also noch negiert werden.-
PD2 Auf
HIsetzen. LED einschalten.
-
PD2 Auf
-
PD2 Auf
LOWsetzen. LED ausschalten.
Der Hauptfehler im ersten Programm ist, dass der internen Pullup-Widerstand am PB2 nicht aktiviert wurde. Der Taster ist extrem anfällig auf äußere EM-Störungen und schaltet ggf. verzögert oder gar nicht.
Aufgabe b)
Quellcode II
#define F_CPU 16000000UL
#include <avr/io.h>
int main(void)
{
DDRD |= 0b11111111;
DDRB &= ~0b00000100;
PORTB |= 0b00000100;
while (1)
{
if(!(PINB & 0b00000100)) {
PORTD |= 0b00000100;
}
PORTD &= ~0b00000100;
}
}main() Funktion
PORTB |= 0b00000100;
Der Hauptfehler aus dem ersten Programm wird hier eliminiert. Der interne Pullup-Widerstand an PB2 wird aktiviert.
Das Programm hat dennoch einen gravierenden Fehler im Programmablauf.
Beim Tastendruck wird die if-Bedingung zwar angesprungen und die LED eingeschaltet. Jedoch wird sie danach sofort ausgeschaltet. Die LED wird also mit einem Hochfrequenten PWM-Signal angesteuert. Dies sorgt dafür, dass die LED dunkler leuchtet, allerdings auch und vor allem für viele Störsignale.
Messung 1 an der LED
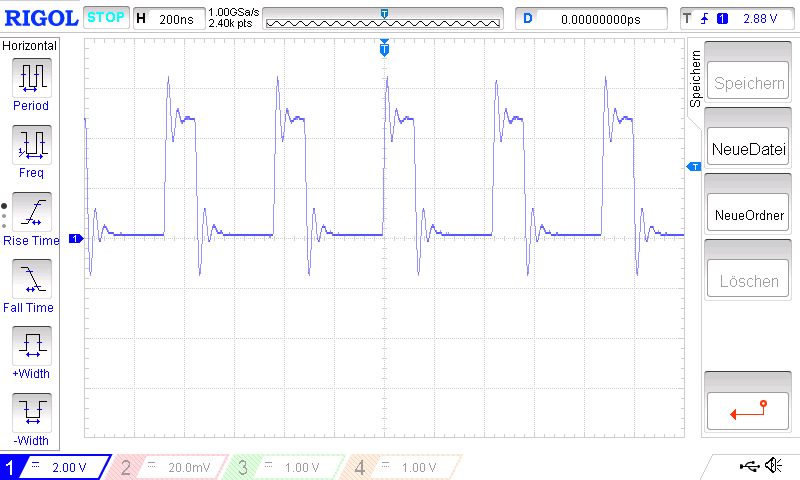
Messung an der LED
Die Messung an der LED zeigt ein PWM-Signal mit einer Pulsdauer von T=440 ns.
Dies entspricht einer Pulsfrequenz von etwa 2,3 MHz.
Aufgabe c) Quelltext:
#include <avr/io.h>
int main(void)
{
DDRD |= 0b11111111;
DDRB &= ~0b00000100;
PORTB |= 0b00000100;
while (1)
{
if(!(PINB & 0b00000100)) {
PORTD |= 0b00000100;
}
else{
PORTD &= ~0b00000100;
}
}
}Die else-Bedingung eliminiert den Fehler aus Quellcode II.
Messung 2 an der LED
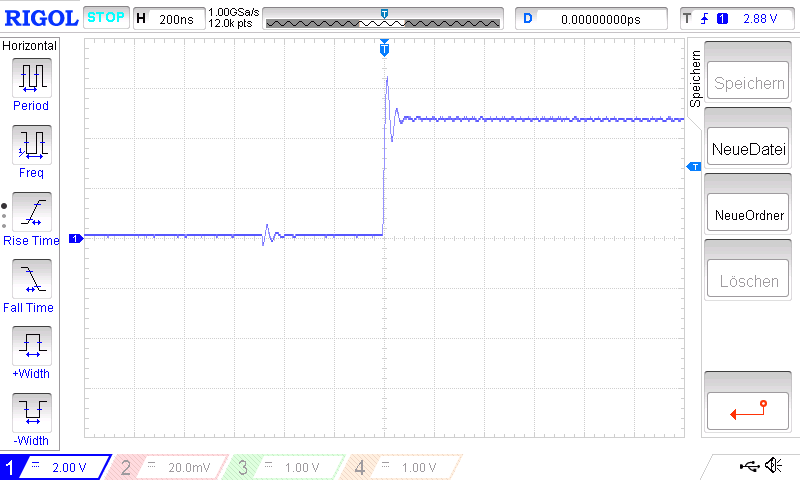
Messung an der LED
Die Messung an der LED zeigt den Einschaltmoment und danach ein konstantes HIGH-Signal.